Joseph Pranadeer Reddy Katakam
About Me

I'm a Solutions Engineer II at Agility Robotics, building humanoid robots to support the labor force. With a master's degree and hands-on experience tinkering with 6-axis paint robots, I've honed troubleshooting skills for hardware and software—usually fueled by patience and coffee. I tackle complex problems from multiple angles across the stack and am excited to drive robotics and AI innovations that improve lives and extend human capabilities.
Interests & Hobbies
My Journey
Education
Master's in Robotics
University of Maryland, College Park
Specialized in core fundamentals of robotics and honed good software practises for developing robotic applications using C++ and Python.
Courses Taken
- Building Manufacturing Robot Software System- Developed a software system using C++ and Python for the ARIAC competition, simulating advanced kit building and assembly in a virtual warehouse environment
- Software Development for Robotics- Mastered industry-standard software development practices through a series of challenging C++ projects, mirroring real-world robotics industry workflows
- Perception for Autonomous Robots- Delved into the intricacies of computer vision, exploring advanced image processing techniques crucial for developing perceptive autonomous systems
- Robot Modelling (Kinematics & Dynamics)- Leveraged linear algebra concepts to build robotic arm control systems from the ground up, gaining deep insights into the principles of kinematics and dynamics
- Planning for Autonomous Robots- Implemented and analyzed various path planning algorithms including DFS, BFS, Dijkstra, A*, and RRT, evaluating their performance in diverse simulated scenarios
- Controls for Robotic Systems- Explored the foundations of control theory, including advanced filtering techniques and controllers like PID and LQR
- Independent Research Study- Swarm Robotics- Conducted innovative research on swarm algorithms, comparing the efficiency of single and paired kilobots in forming concentric circles; Findings were compiled into a comprehensive academic paper
Bachelor's in Electronics
Sathyabama University
Developed a strong foundation in electronic circuits, embedded systems, engineering practises, and publishing papers. Graduated top 1% of the department (7th out of 700 students), showcasing academic excellence and dedication.
Courses Taken
- Programming in MATLAB- Acquired foundational skills in MATLAB, focusing on its application in signal processing analysis
- Digital Logic Circuits- Explored the construction of Digital Logic Circuits using logic gates, with an introduction to PLC programming concepts
- Micro-controllers and Micro-processors- Gained experience in programming 8085 and 8086 microcontrollers using assembly language
- Engineering Mathematics- Studied essential mathematical concepts including Laplace and Fourier transforms, Calculus, Linear Algebra, and Trigonometry, forming a solid foundation for engineering applications
- Programming in C & C++- Developed a strong foundation in C and C++ programming languages, with additional exposure to modern C++ concepts and parallel programming techniques
- Embedded systems- Explored the theory and architecture of embedded systems, understanding the importance of low-level programming in managing memory constraints for various applications
Experience
Solutions Engineer II
Agility Robotics
World's leading manufacturer of humanoid robots and the advanced automation solutions that they are part of.
Work Done
Humanoid Robotics
Digit

Deployment
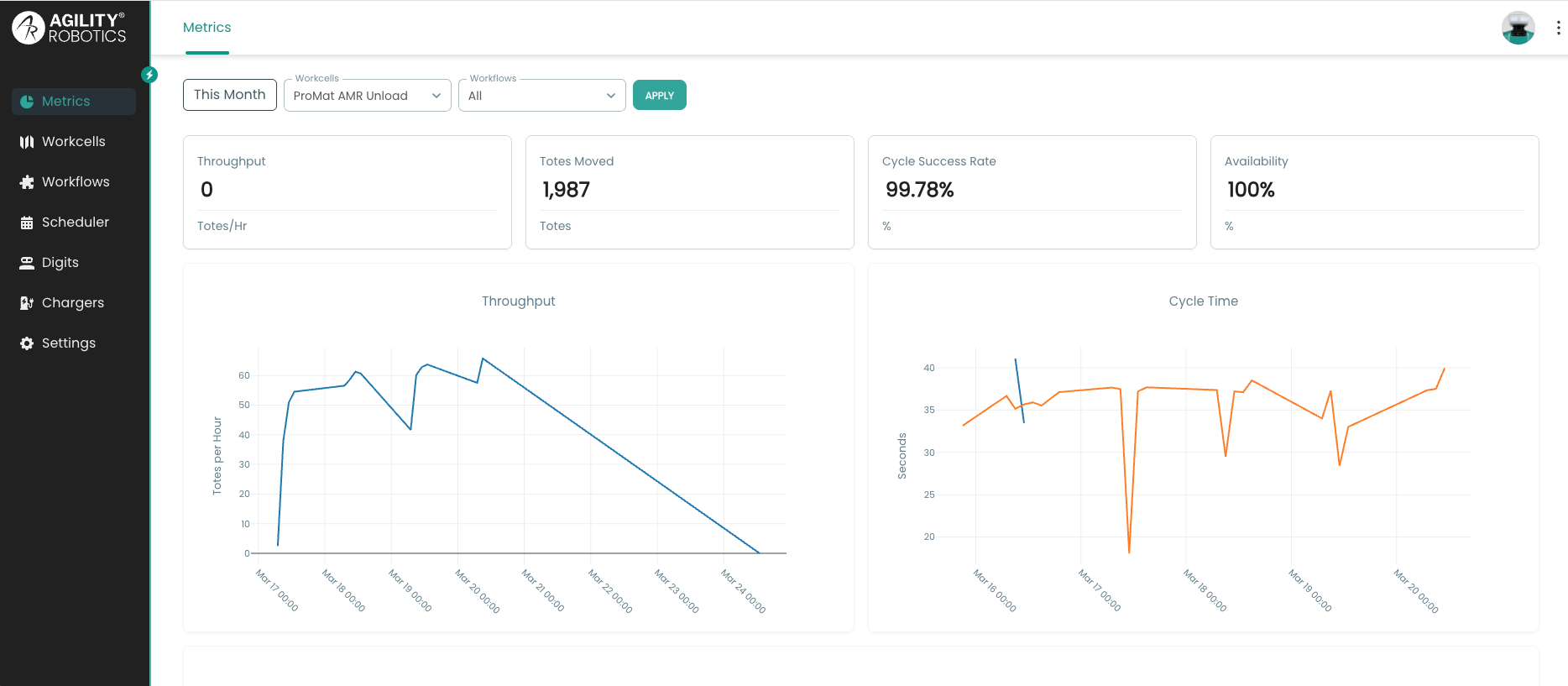
Agility Arc
Automation Engineer
Rivian
Spearheaded the development and optimization of automated processes, focusing on 6DOF paint (IRB5500) and sealer robots (IRB4600) to improve production efficiency and reduce downtime at Rivian.
Work Done
- Production Line Optimization- Active part of maintenance, and troubleshooting of ABB paint robots (IRB 5500) and sealer robots (IRB 4600) in sealer, primer, and topcoat-clearcoat booths; Minimized downtime by proactively managing production processes and developing a 'Dozer Degrade' program to act as a backup during sealer supply failures
- Cost Savings & Efficiency Projects- Developed RAPID scripts in RobotStudio to automate calculations for units-vs-vision fails and material consumption; Utilized this data to trend fluctuations, monitor robot health, and trigger alarms when quality was impacted, enabling early intervention and improved efficiency
- Process Simulation and Deployment- Leveraged RobotStudio to simulate programs on Robot backups and analyze signals before deployment, ensuring seamless integration into production workflows while minimizing errors during implementation
- Knowledge Sharing and Team Support- Developed and delivered SharePoint training materials on my custom robot sealer/LASD programs and maintenance procedures, along with instructional videos, empowering technicians and production teams to troubleshoot, collaborate, and minimize downtime during robot failures
- Maintenance and Calibration Excellence- Created calibration routines for resolver offsets, improving robot precision of sealing operations; Assisted in rebuilding equipment as needed to ensure consistent workflow efficiency and long-term reliability
Industrial Robotics

Rivian Paint Process
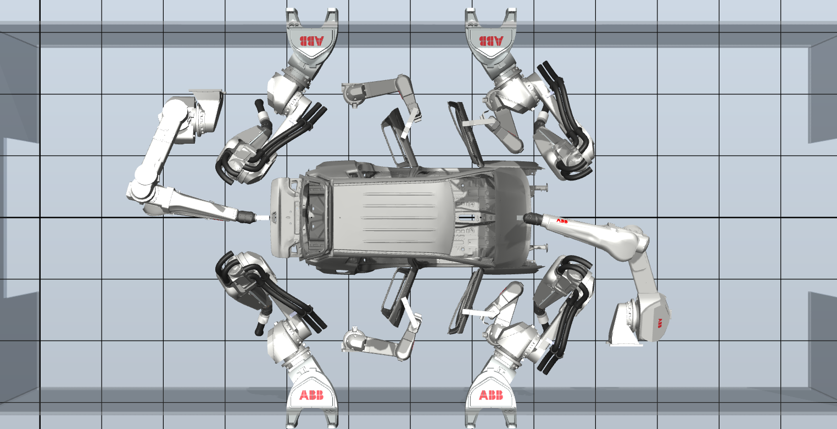
ABB Simulation

Paint Robots: IRB-5500

Sealer Robots: IRB-4600
Software Eng. Intern
Stryker
Contributed to the development and validation of bone registration algorithms for the MAKO 3.5 model of Stryker surgical robotics.
Work Done
- Component Testing- Developed efficient and optimized component-level test cases using advanced C++ concepts such as smart pointers, friend classes, and proprietary templates; Leveraged edge cases of registered patient data (femur and tibia) to validate successful mapping of coordinate systems via homogeneous transformations, ensuring point cloud integrity by verifying matrix determinants
- Bone Registration for Surgical Robotics- Worked on knee surgery bone registration algorithms for MAKO 3:5 robotic systems, covering approximately 20% of the workflow and ensuring proper algorithm functionality in complex tech stacks
- Knowledge Sharing and Documentation- Created easily understandable diagrams and flowcharts for Software Design Description (SDD), which were adopted company-wide to streamline code comprehension, accelerate intern onboarding, and improve team productivity
- Onboarding Process Improvement- Identified and addressed hindrances in the new hire onboarding process, resulting in reduced setup time, increased productivity, and a smoother transition for new employees
- Technical Presentation and Skill Demonstration- Demonstrated a quick understanding of complex bone registration and applied this knowledge to create effective test cases, presenting this work to the entire company and receiving high praise for contributions
- Development Tools Proficiency- Utilized Perforce, Qt, Docker, Jira, and SDLC to streamline the development process and contribute to the overall success of the team and company
Surgical Robotics

Internship

MAKO 3.5
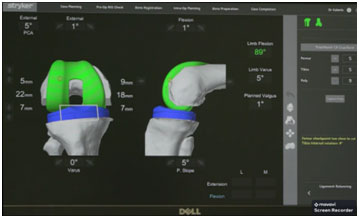
Knee Replacement
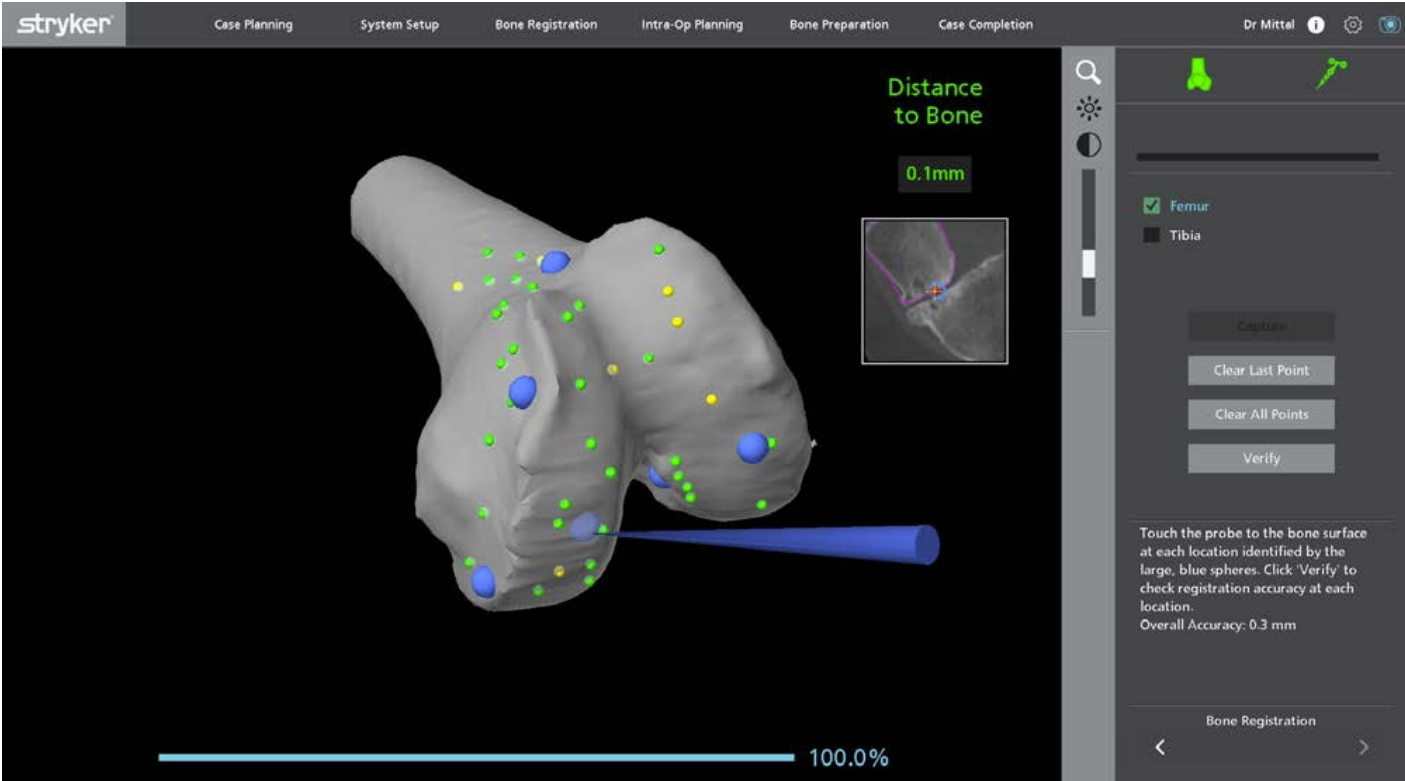
Bone Registration
Research Assistant
University of Maryland, CP
Conducted swarm robotics research involving kilobots, focusing on shape formation analysis, code optimization in Embedded C, and chassis design for collision avoidance, with findings submitted for publication at ISER.
Work Done
- Swarm Algorithm Experimentation- Conducted experiments to investigate and compare the performance of kilobots operating individually versus in pairs (DUOs), dynamically observing shape formations using a triangulation method to form concentric circles; Analyzed results based on metrics such as time taken, shape accuracy, and collision/avoidance rates to gain insights into swarm behavior and capabilities
- Embedded C Codebase Management- Modified and organized the kilobot codebase in Embedded C, correcting errors, removing redundant code, and providing clear documentation using flowcharts and README files for future maintenance
- Kilobot Chassis Design- Designed and developed physical chassis for kilobots with collision avoidance mechanisms to prevent attachments during operation, significantly improving their overall performance and durability, and contributing to project success
- Research Publication- Research submitted for approval at Industrial and Systems Engineering Review (ISER)
Swarm Robotics
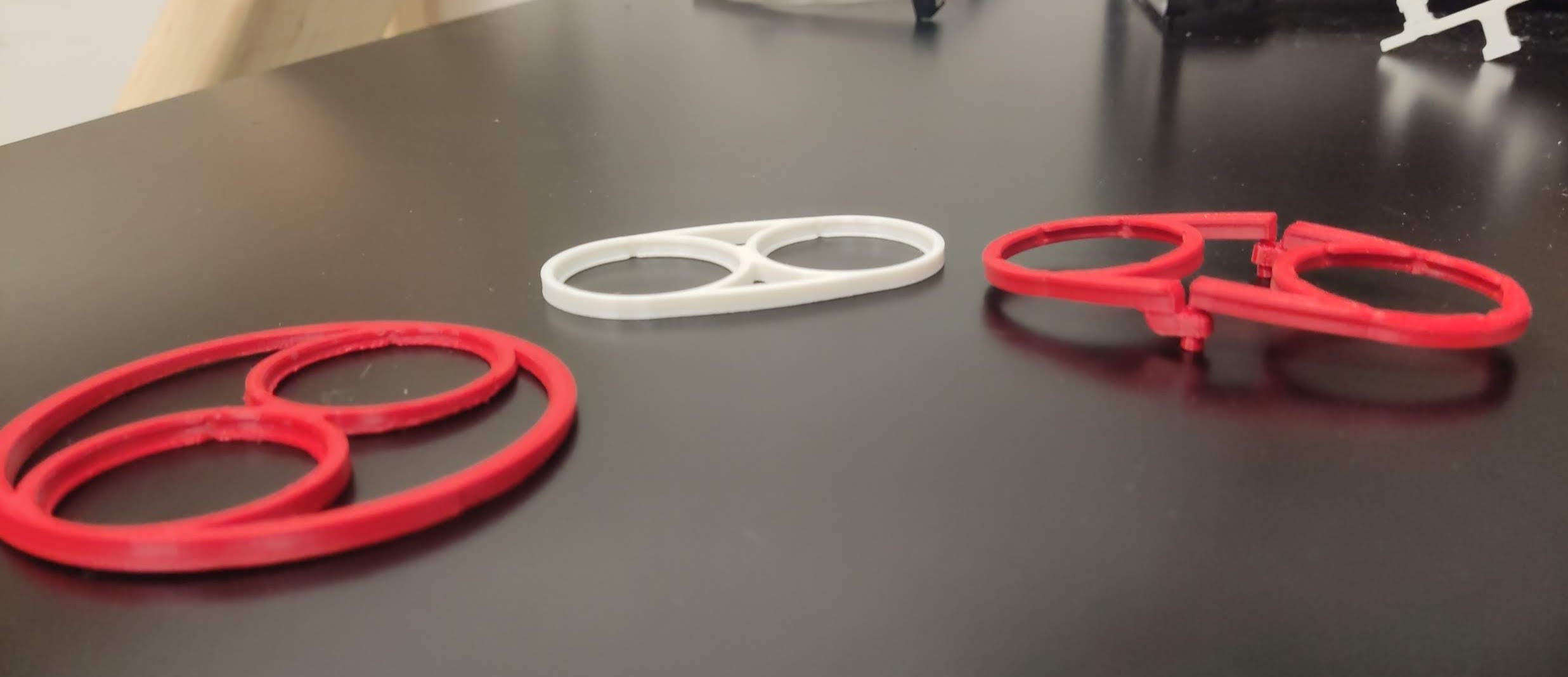
Kilobots Chassis
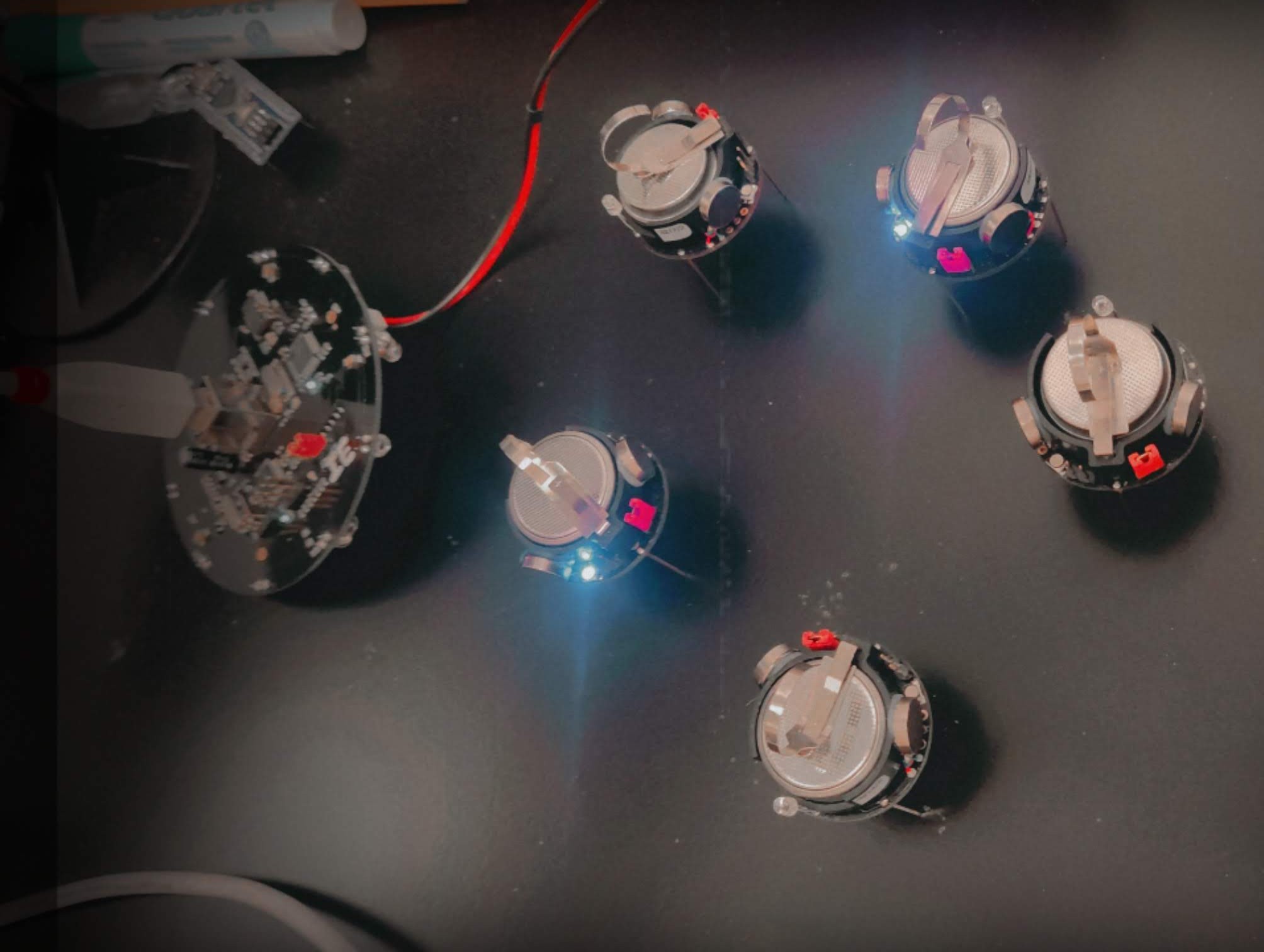
Deploying Code
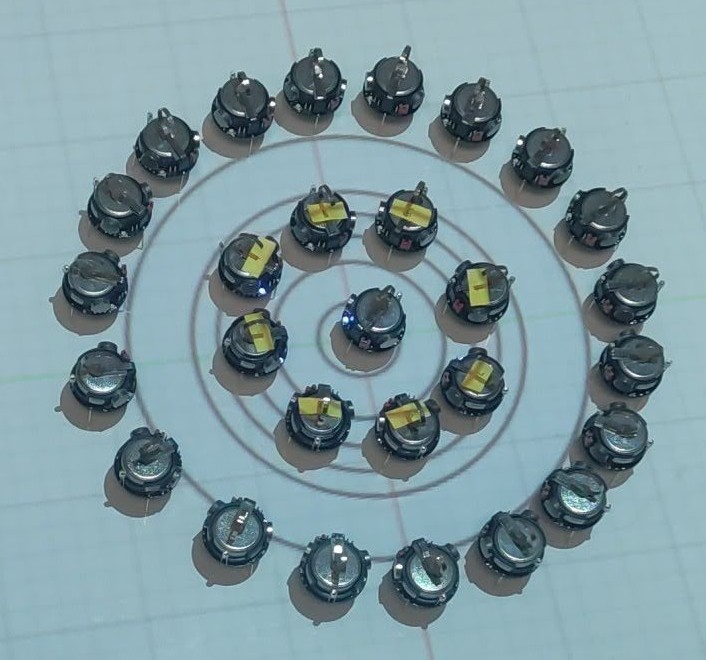
Single's swarm formation
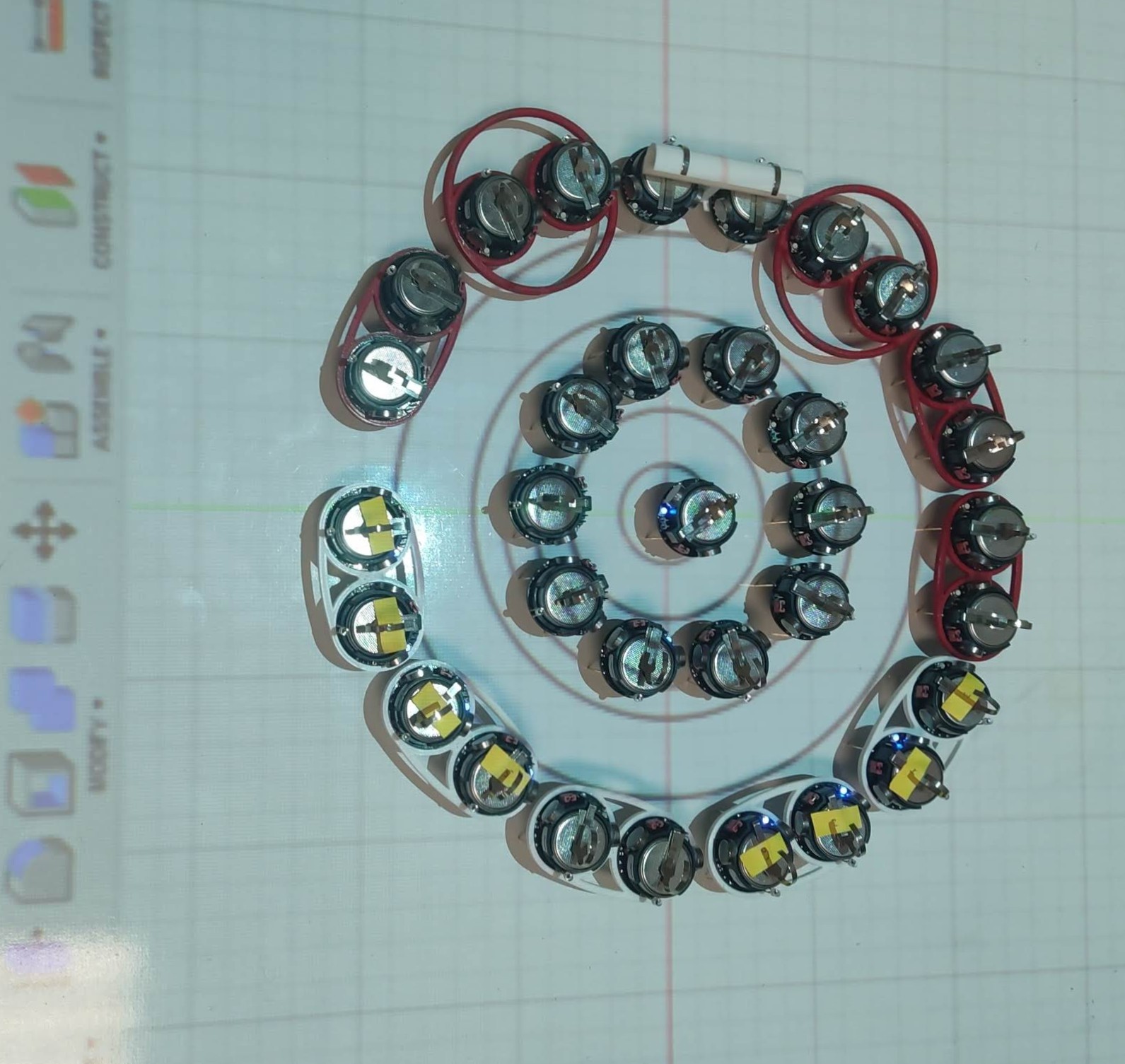
Duo's swarm formation
Featured Projects
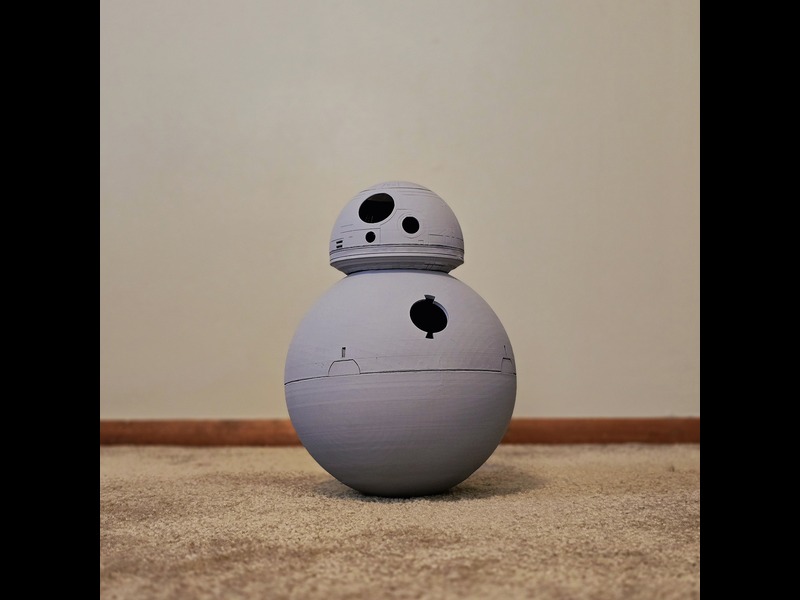
BB8
Meet Mini-BB8: My personal Star Wars companion! Half the size, twice the charm, all the smarts.
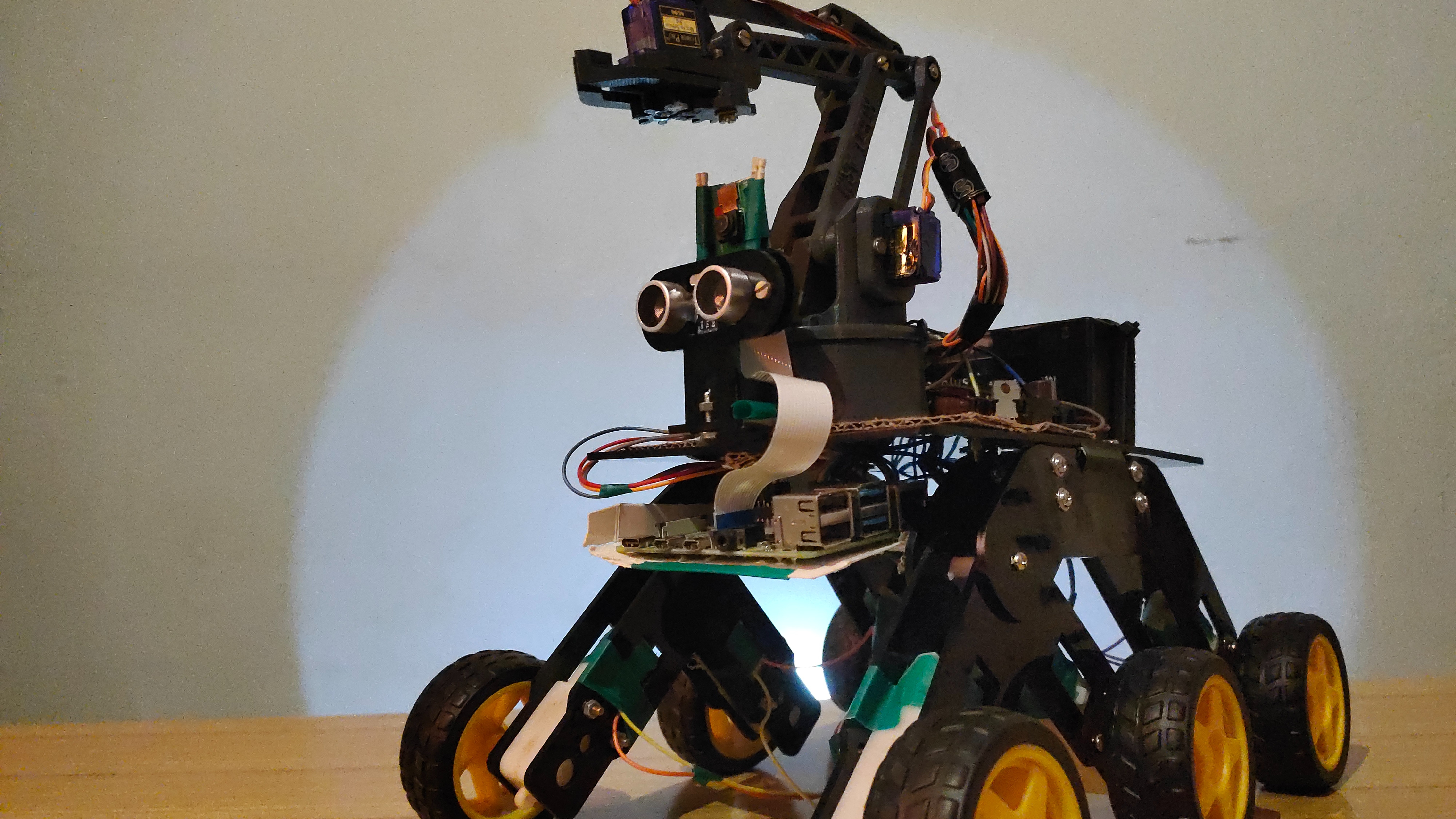
Road Runner
Steering Into Tomorrow: An Autonomous Lane-Following Companion With Visual Intelligence
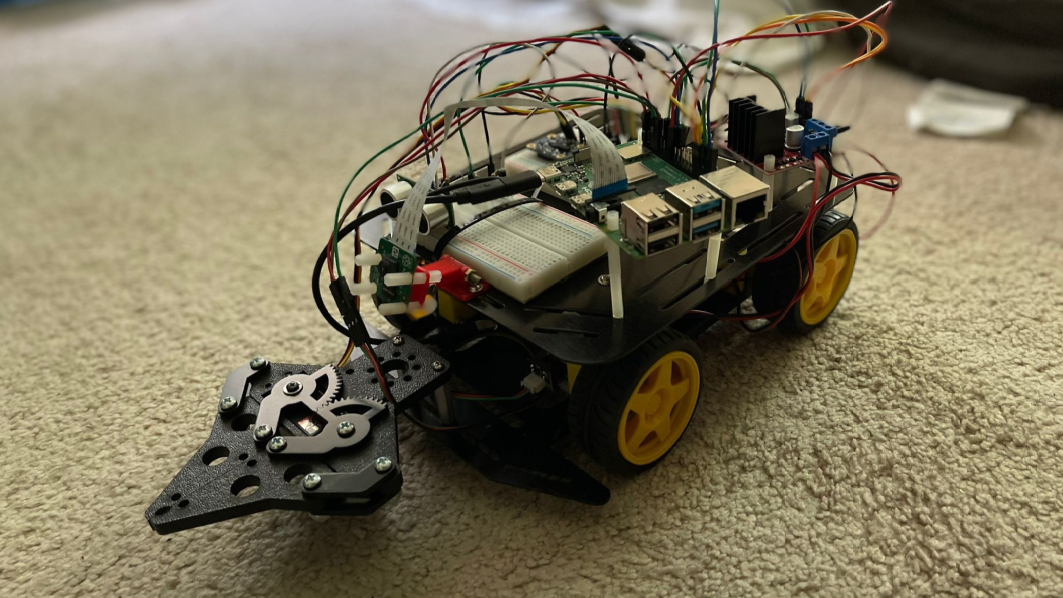
ARIA
Autonomous voice-controlled rover that explores, identifies, and retrieves objects on command.
Technical Skills
Here are some of my skills that I've been working on over the years